
















Breaking news









REP(MUS) 21 exercise gives Allies a chance to field and evaluate new maritime technologies.
Exercise REP (MUS) 21 took place from 13 to 24 September, with a special focus on Tróia and involved more than 40 entities, including 17 Navy, 15 Research & Development Entities, 1 University and 8 organizations of NATO.
Follow Navy Recognition on Google News at this link
 The REP (MUS) exercise is an experimentation exercise for Unmanned Maritime Systems (Picture source: RS)
The REP (MUS) exercise is an experimentation exercise for Unmanned Maritime Systems (Picture source: RS)
REP (MUS) 21 stands for Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems. The REP (MUS) exercise is an experimentation exercise for Unmanned Maritime Systems. It started in 2010, with a protocol between the Portuguese Navy and the Faculty of Engineering of the University of Porto (FEUP), which over the years has grown and aroused national and international interest from other entities.
 Mine Counter Measure exercise (Picture source: Laboratório de Sistemas e Tecnologia Subaquática)
Mine Counter Measure exercise (Picture source: Laboratório de Sistemas e Tecnologia Subaquática)
Besides the typical missions for mine detection and C3 networks, this year LSTS was part of the Collaborative Interoperable Autonomy Experiments. These experiments' goal was to achieve interoperability under the new standard SCI 343 framework and conduct collaboration between multiple autonomous systems. This initiative involved joint work between LSTS, TNO and NSWC-PCD.
In the future of MCM, the goal is to have common processes and procedures regarding mine detection to have more effective results to reduce the risk of missions.
 DISSUB (stands for Distressed Submarine) exercise (Picture source: Laboratório de Sistemas e Tecnologia Subaquática)
DISSUB (stands for Distressed Submarine) exercise (Picture source: Laboratório de Sistemas e Tecnologia Subaquática)
The DISSUB (stands for Distressed Submarine) exercise is focused on the usage of underwater digital communications (STANG4748 also known as JANUS) for support in submarine SMER (Submarine Escape and Rescue) operations. This exercise in REP dates back to REP17 edition, and has been developed and experimented over the last editions under the scope of the EUMarineRobots project as a joint research activity (JRA) between the NATO CMRE and UPORTO FEUP LSTS, in close cooperation with the PT Navy. The main goal for LSTS is to further integrate the use of the AUVs during the searching phase of a distressed submarine.
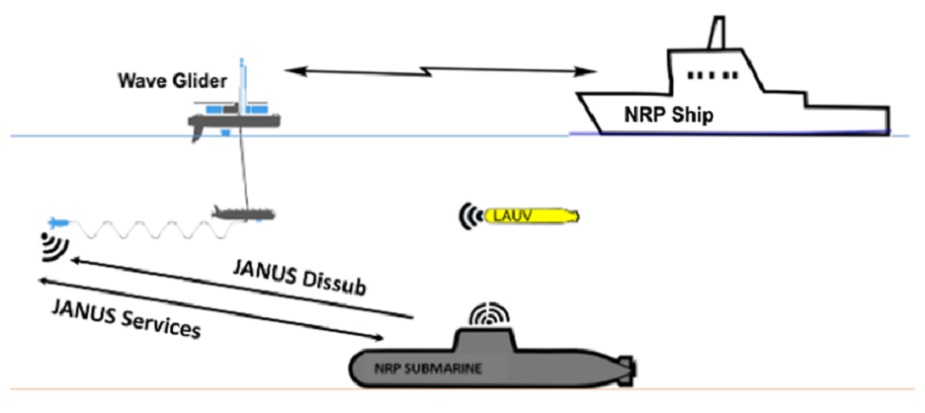
The exercise outline goes as follows:
- After a hypothetical emergency is declared, a JANUS enabled underwater telephone onboard the NRP Submarine starts sending periodically JANUS messages with estimated position and relevant vital data of persons and environment.
- - The JANUS packets will be picked up by the Wave Glider and forwarded to the AUVs operating in the area.
- - The AUVs are used to triangulate and confirm the position of the distressed submarine to reduce the error on the sent location.
- - The AUVs receiving the distress data will trigger a searching behavior navigating towards and around the submarine.
On the 15th and 18th of September the DISSUB exercise was executed and we were able to successfully receive a distress signal from the NRP Submarine and execute search patterns automatically generated onboard the AUV. The AUV surveys confirmed the NRP Submarine location and acquired sidescan images on the location.
This year’s edition was more challenging due to COVID-19 restrictions, but nonetheless we were able to improve the quality and efficiency of the automatically generated search patterns. In the next edition we hope to improve the communication procedure between the AUVs and the Wave Glider, in order to trigger the search pattern survey more efficiently.
 A UK Royal Navy sailor and UK Royal Marine prepare to launch an ‘Otter,’ an unmanned maritime drone built by Norway-based Maritime Robotics AS, into the sea off the Troia Peninsula in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21.(Picture source: NATO)
A UK Royal Navy sailor and UK Royal Marine prepare to launch an ‘Otter,’ an unmanned maritime drone built by Norway-based Maritime Robotics AS, into the sea off the Troia Peninsula in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21.(Picture source: NATO)
 A group of Acecore ‘Neo’ quadcopters take flight on the Troia Peninsula in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21. (Picture source: NATO)
A group of Acecore ‘Neo’ quadcopters take flight on the Troia Peninsula in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21. (Picture source: NATO)
 Sailors on the German Navy research vessel Planet recover an autonomous underwater vehicle off Sesimbra in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21 (Picture source: NATO)
Sailors on the German Navy research vessel Planet recover an autonomous underwater vehicle off Sesimbra in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21 (Picture source: NATO)
 A Spanish Navy SEAD 23 unmanned boat sits anchored off the Troia Peninsula in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21 (Picture source: NATO)
A Spanish Navy SEAD 23 unmanned boat sits anchored off the Troia Peninsula in Portugal during exercise “Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems” REP(MUS) 21 (Picture source: NATO)